R&S继续与你探讨C-V2X拥塞测试的那些事儿之——从理论到现实
在理论篇,R&S介绍了理论上车辆模拟仿真的情况,那么为了实现车载拥塞场景的仿真,我们需要一些相应的测试仪表、仿真平台和测试用例来实现拥塞场景的模拟工作,整个平台的逻辑示意图如图1所示,有如下几个部分组成和相应的功能模块:
V2X仿真平台CMW500
1.多车环境接入层模拟
2.PC5 ITS消息的收发,并且控制不同车辆的功率以及物理层资源调度
3.物理层基带信号衰落模拟
实时卫星模拟器SMBV100B
1.PC5时序同步
2.产生并实现OBU的路点信息
Canoe.Car2x仿真平台
1.交通场景编辑以及场景运行,测试结果分析统计
2.V2X传输层以及应用层协议实现
3.通过CAN/Ethernet实现DUT的HIL测试
车载待测件OBU
1.测试结果状态分析以及统计
2.ECUHIL监控-Optional
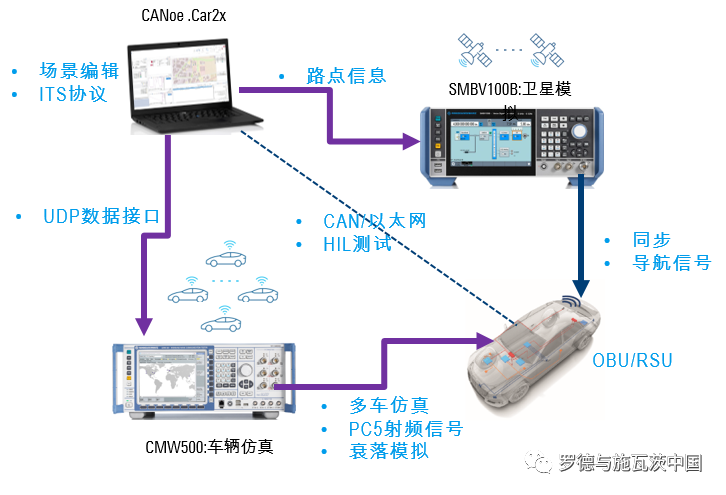
图1.拥塞测试逻辑框架
基于上述的仿真方案,R&S将以一个150辆车的仿真实例来带大家看一下如何进行大规模车辆仿真实测。首先我们需要配置Canoe.Car2x跟CMW500的接口进行配置。Canoe.Car2x将通过R&S公司和Vector公司定义的KAA550接口发送UDP数据将上层协议数据通过CMW500发送出去。下图即KAA550的适配接口。
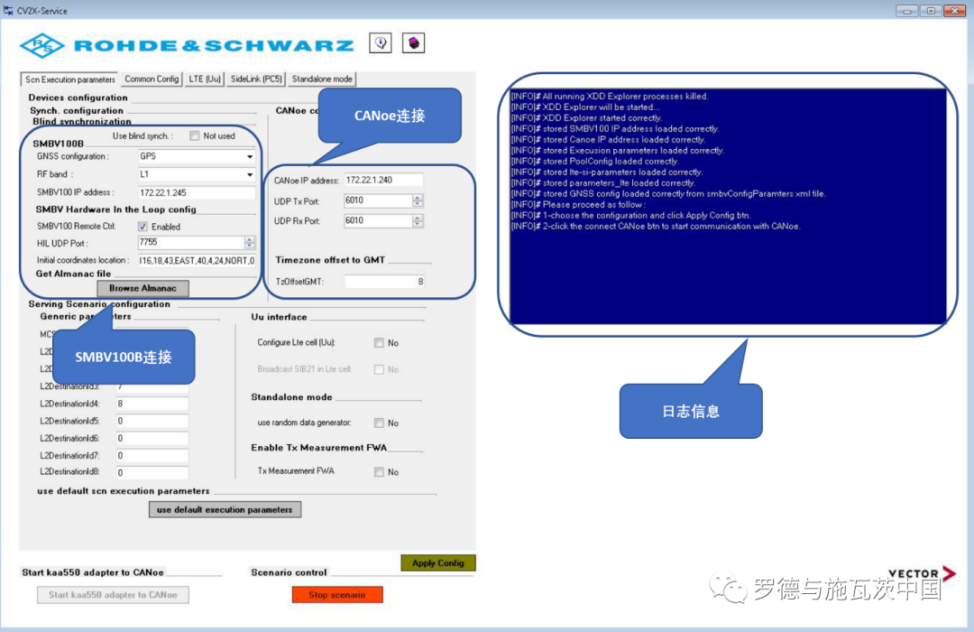
图2.仪表接口以及连接配置
在Sidelink PC5界面,我们可以对物理层参数以及Fading进行配置。
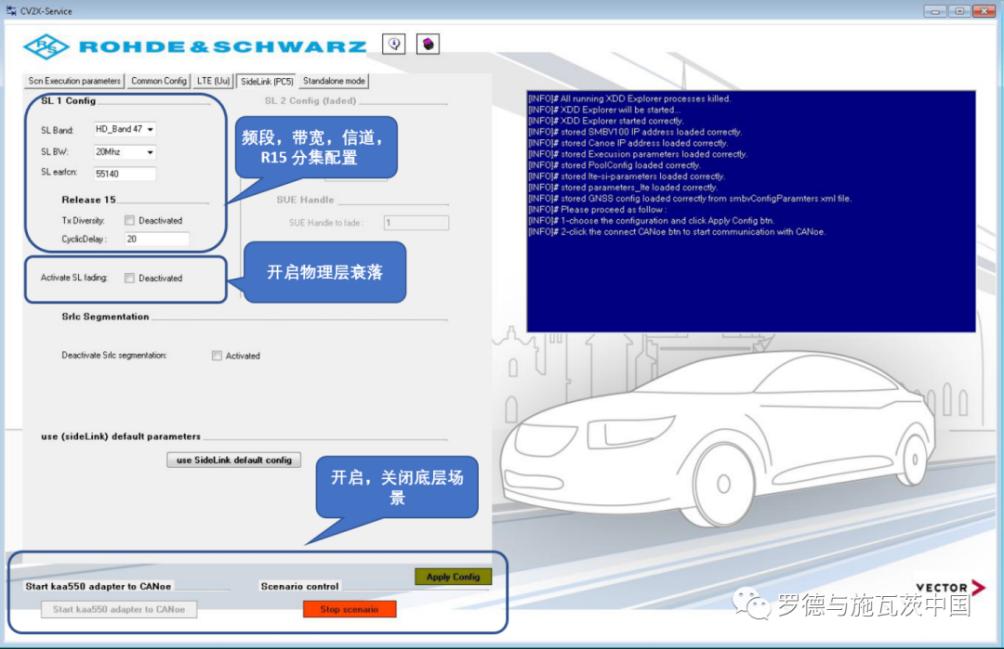
图3.仪表接口部分物理层配置
Canoe.Car2x测试平台
在完成了Canoe.Car2x,CMW500,SMBV100B的配置之后,就可以在Canoe中进行软件相关配置,场景编辑,场景开发以及测试运行了。如下窗口显示了相关配置信息:
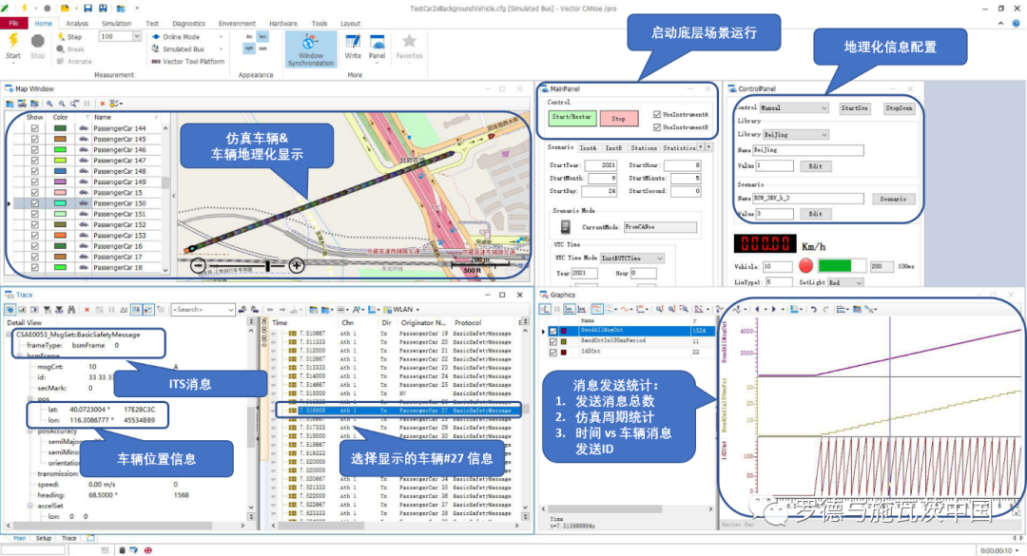
图4.Canoe.Car2x运行界面
消息发送统计:
消息发送分析,这里我们可以在图五中看到消息发送是以100ms为周期进行的,即每100ms会完成150辆车的消息发送。在图六中我们可以看到 8.523时刻时,发送150辆车到21次,第21次中,发送到id的值为34。
由此计算8.523时刻时共发送了:20 × 150 + (34 + 1)= 3035次BSM消息。
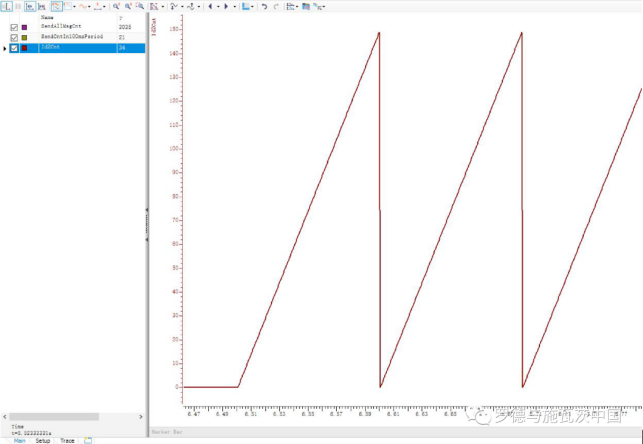
图5.Graphics窗口 时间 vs车辆ID发送
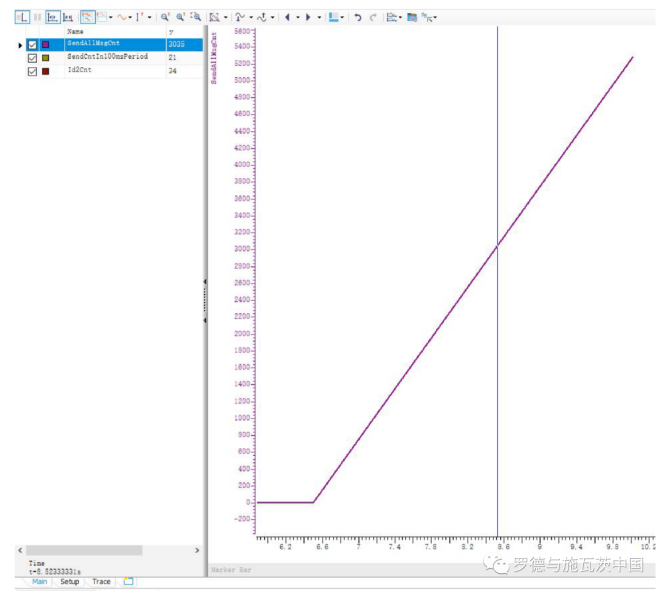
图6. Graphics窗口记录BSM消息发送的个数
DUT端的HIL分析
我们可以同时在OBU的操作软件中同步分析OBU收到的ITS消息的情况,这里记录了在同样的状态下,待测OBU收到了150辆车发送的消息。
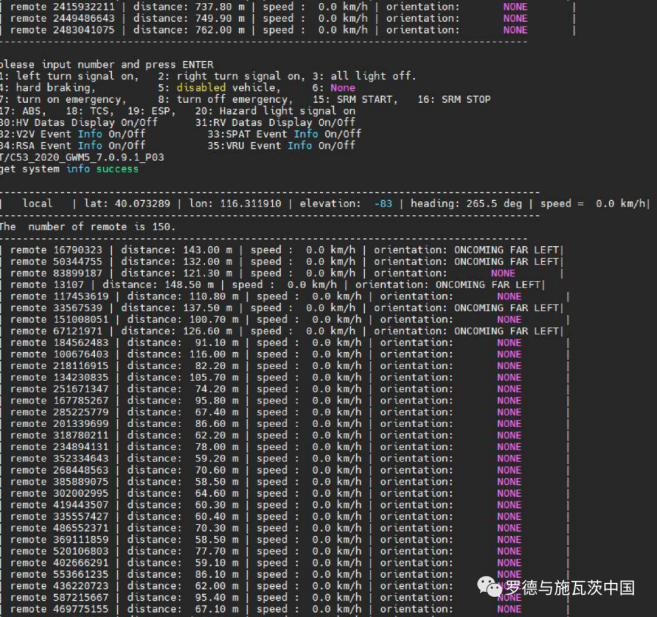
图7. OBU打印log数据
总结
R&S于本文介绍的仿真方案和平台可以提供多种功能,例如针对V2X不仅可以实现共计30个基本的DAY1,DAY2的交通模拟场景,也可以支持自定义的场景来进行算法验证,同样也可以稳定支持我们在未来面临拥塞场景的测试挑战。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读




猜你喜欢
-
Aemetis获2400万美元定单,在加利福尼亚分发健康安全产品
2022-03-31 -
OESH Shoes使用Huntsman的TPU材料通过3D打印创建可回收的鞋底
2022-03-24 -
OESH Shoes使用Huntsman的TPU材料通过3D打印创建可回收的鞋底
2022-03-24 -
帝斯曼完成对Erber Group的收购
2022-03-04 -
Azelis将在希腊分销巴斯夫的健康和着色剂成分
2021-12-11 -
Azelis将在希腊分销巴斯夫的健康和着色剂成分
2021-12-11 -
Azelis将在希腊分销巴斯夫的健康和着色剂成分
2021-12-11 -
Azelis将在希腊分销巴斯夫的健康和着色剂成分
2021-12-11 -
Azelis将在希腊分销巴斯夫的健康和着色剂成分
2021-12-10 -
Azelis将在希腊分销巴斯夫的健康和着色剂成分
2021-12-10 -
Azelis将在希腊分销巴斯夫的健康和着色剂成分
2021-12-10 -
印度促进生物和有机肥料的使用,以提高农业生产力
2021-11-22 -
Sankeshu创新和开发“食品接触”墙面涂料-Sankeshu BB涂料
2021-09-14 -
中国漆器长颈鹿品牌未加儿童漆震撼市场
2021-09-06 -
2020年大脑健康市场关键词:功能性原料
2021-08-19






